


































Groups of animals often perform complex tasks despite individuals having extremely limited abilities, knowledge of, or control over the whole group. Ants build bridges from their bodies that allow them to cross gaps in the terrain, crowds of people get stuck in corridors during fire, and fish often explore their habitat in coordinated bouts of swimming. The question of how these complex forms of behavior arise requires understanding the behavior of the individuals and interaction between them. One way to proceed is to build mathematical models to determine which model features are required to produce the observed emergent behavior of the group. In our current work we take an inverse approach: we use the recorded behaviors and animal trajectories to infer what governs the animals’ motion and their behavioral switches.
One of the major obstacles in studying collective behavior of animals used to be the lack of high-resolution recordings of animal trajectories. Recent development of automated tracking of animal motion shifted the focus to the data analysis and modeling aspects of this research. This is hindered by the fact that individual animals show a range of distinct stereotypical behaviors, often identifiable from the recorded data. While the standard models of collective motion fail to incorporate these individual behaviors, such as changes in body pose, motor control, vocalizations, feeding actions etc., and rather work with a single, “average” or “effective” behavior, we propose a framework that incorporates the heterogeneity of the individual behavior using probabilistic hybrid models with distinct internal states and random switching between them. Such a model of individual behavior then becomes a building block for the stochastic description of the whole group of animals, where interactions between animals modulate the transition rates between the internal states.
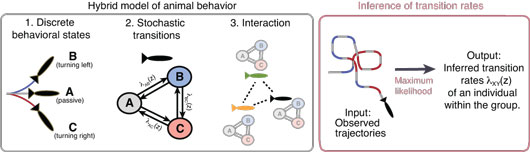
Figure: Motion of fish described by a hybrid model. The model consists of three dynamic behavioral states and stochastic transitions between them, which are modulated by pairwise interaction. Inference of the transition rates is performed by maximization of the likelihood of the model, given the trajectories of the fish.
Technically, our probabilistic models are formulated such that they permit both fast forward simulation, by generating synthetic behavioral trajectories of a group of animals, and fast inference of interaction and behavioral parameters from data. These beneficial properties are inherited from the “Generalized Linear Models” (GLMs) statistical framework which provides the theoretical basis for our work. Interestingly, our motivation for using GLMs comes from their recent and very successful use in neuroscience, where they describe the “decision” of a neuron to fire given the activity of other neurons in the network and the stimulus that neurons are receiving; in our work, the “decisions” are animals' switches in behavior, and they are affected by other conspecific animals and the environment. This cross-pollination between fields showcases the interdisciplinary nature of our HFSP grant, which proposed using neuroscience-motivated methods to understand decision-making and computation in animal groups.
Our methods paper highlights a few further benefits of the new framework and illustrates them on two synthetic and one real datasets. First, no previous knowledge of the physical laws of motion in each behavioral state is required. This is crucial because realistic datasets are limited and the task to reconstruct the full description of motion is often out of reach. To demonstrate this, we used real zebrafish swimming trajectories, identified the behaviors and revealed the key mechanisms behind the motion of individuals, interaction among them and response to the environment. Second, the model requires an assumption on the variables that the behavioral switching rates depend on. However, thanks to the use of statistical inference techniques, we are able to directly compare performance of alternative models and thus to perform a rigorous Bayesian model selection to systematically identify the relevant variables. Finally, our approach is easily extendable to cases where changes between the behaviors depend on the history of the system, making it applicable to a broad range of applications.
Text by Katka Boďová and Gasper Tkačik
Reference
Probabilistic models of individual and collective animal behaviors. Boďová, K., Mitchell, G.J., Harpaz, R., Schneidman, E., Tkačik, G., PLoS ONE 13(3): e0193049