


































Insects can cover large distances but their legs, antennae, and heads are very small, presenting a strong challenge to biologists wishing to understand how their small scale limb movements are coordinated during large scale body movements. For example, a grasshopper jumps with a powerful kick but then lands again with outstretched legs. How do they prepare for landing after takeoff?
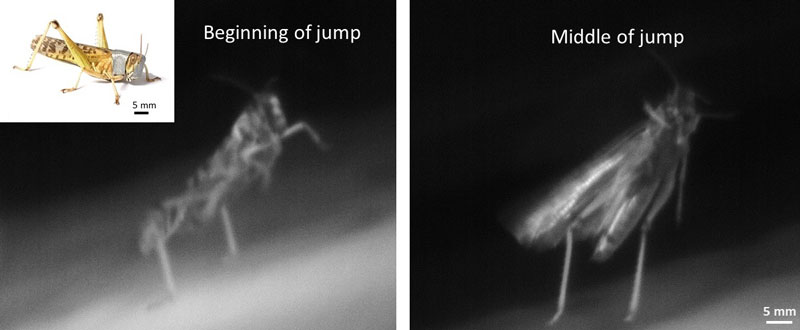
Figure: A jumping locust: high resolution images of a locust during a jump obtained from the system. Inset shows locust wearing a reflective marker.
While telemetry and fixed camera-based tracking systems have been used to record the positions of the insects on a large scale, they only treat them as single dots without details of the body parts. Efforts have been made to record insect body parts in high resolution within small volumes of interest such as around individual flowers or nests using multiple high-speed cameras. However, there is no information on how the insects behave outside that small volume to reach the desired flowers or nests. Such a common trade-off between spatial resolution of the insect body and the tracking volume would hinder us from fully understanding the insect’s navigation as we need both the positions and high-resolution images simultaneously.
A new tracking system developed by Prof. Dr. Andrew D. Straw and HFSP Cross-Disciplinary Fellow Dr. T. Thang Vo-Doan from the University of Freiburg is able to overcome such trade-offs by pointing a high speed optical system at the insect while recording high resolution images through the same optical path. A laser shines on a reflector worn by the insect, producing a strong reflection that lands on a detector after bouncing through a mirror system. When the insect moves, this reflection shifts from the center of the detector and an automatic control system moves the mirrors to restore the reflection back to the center. This operates extremely quickly (less than a millisecond), and this high-speed alignment enables high resolution recording of the insect’s body parts while following it over long distances.
Besides insect tracking, the system could also be used for larger animal like birds and bats over greater distances as they can wear bigger markers. In addition, the system could also be used to evaluate the performance of robots.
This research has resulted from a HFSP Cross-Disciplinary Fellowship for developing multiscale tracking systems to study neural circuits of animal behaviors. The project not only initiated interdisciplinary collaboration of engineers and biologists but may also potentially help to extend the network towards more disciplines including robotics and biomechanics to study animal behaviors.
University of Freiburg online magazine