


































Dung beetles (Scarabaeus galenus) are tiny animals capable of self-localization, foraging, home searching, and transferring large dung balls. Existing knowledge is still insufficient to decode neural control mechanisms underlying these complex behaviors. To address this, we used bio-inspired robotics to develop “embodied” neural control mechanisms for a dung beetle robot (see figure). The developed control mechanisms are based on a modular structure consisting of navigation and locomotion modules. The navigation module controls the heading direction of various insect-like behaviors (i.e., random foraging, goal-directed navigation, backward homing, and home searching) with minimal information (i.e., heading angle and speed) rather than global positioning and landmark guidance. A special network with only three sign, Gaussian, and tangent (SGT) neurons inside the module allows for accurate goal-directed navigation, when subjected to sensory noise (e.g., variable sensing errors) and constrained navigation (e.g., fixed sensing errors), thereby facilitating self-localization accuracy. In parallel, the locomotion module based on a central pattern generator (CPG) and premotor neural networks coordinates the 18 joints of the robot and generates various dung beetle/insect-like gaits. We successfully demonstrated the performance of the control mechanisms for real-time indoor and outdoor robot navigation without any landmark and cognitive map (see video below).
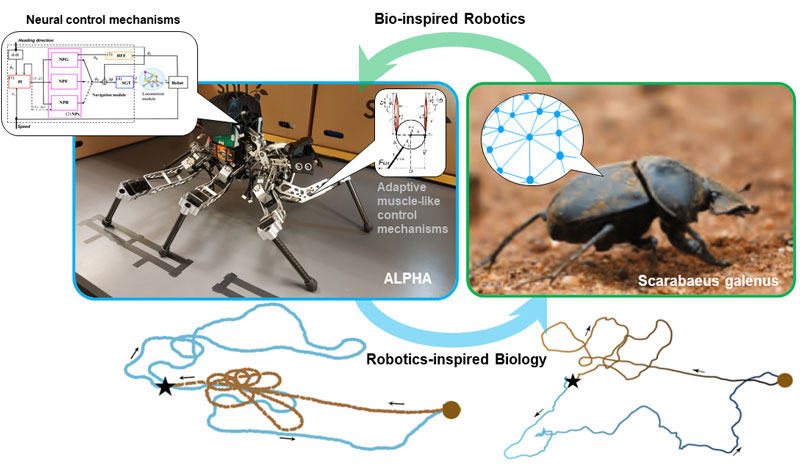
Figure: Left, the dung beetle robot ALPHA developed at the University of Southern Denmark (SDU). It is driven by embodied neural control mechanisms (left inset) to perform robust dung beetle-like locomotion and navigation [1]. Its navigation path with blue and brown lines indicates outbound and inbound tracks. The right inset shows its adaptive muscle-like control mechanisms for joint compliance and stiffness/damping adaptation. Right, the dung beetle Scarabaeus galenus and its navigation path where blue and brown lines also indicate outbound and inbound tracks. For the outbound foraging trip, the robot and dung beetle walk forwards while the inbound homing trip they walk backwards [2]. The pictures of the dung beetle and its navigation path are reproduced with permission from [2] Springer Nature, under a Creative Commons Attribution 4.0 International License, copyright 2020.
Additionally, we also developed adaptive muscle-like control mechanisms (also called adaptive compliance control) for robot joint compliance and online stiffness/damping adaptation [3]. The muscle-like mechanisms, mimicking muscle functions in animal movement, provide the robot with adaptive features such as impact force absorption when dropping the robot from a particular height (see video 1), payload compensation when standing (see video 2), and disturbance rejection while walking (see video 3). The mechanisms are general, and they have been used in human robotics (e.g., multifunctional rehabilitation [4]). Interestingly, the human robotics application reveals an interactive stiffness/damping variant and invariant when humans physically manipulate objects.
Our reverse engineering-based control development gives a possible option to reveal the secrets of dung beetles and insects: 1) How can they deal with sensory noises to robustly achieve self-localization, foraging, and backward homing without landmarks? (see [1], [2]); How can they find their homes when getting lost? (see [1],[2], and [3]); How can they coordinate their legs and adapt their muscle stiffness for efficient locomotion? (see [3],[4]).
This work was carried out by researchers from the University of Southern Denmark under the HFSP/Dlife project. The project has been performed under a collaboration with Kiel University (Germany), Stockholm University (Sweden), Lund University (Sweden), and Vidyasirimedhi Institute of Science and Technology (Thailand). The support of HFSP played a significant role in this work. It has been instrumental in achieving this insight which can guide future bio-inspired robot development. The developed dung beetle robot ALPHA and its control mechanisms can potentially be utilized as a tool for biological research (robotics-inspired biology).
|
HFSP award information Research Grant - Program (RGP0002/2017): A dung beetle’s life: how miniature creatures perform extraordinary feats with limited resources Principal investigator: Emily Baird, Stockholm University, Sweden (nationality: Australia/UK) |