


































The Merriam-Webster dictionary states that design is the process of creating, fashioning, executing, or constructing according to a plan. The variety of animal morphologies and behaviors reflects plans that are tailor-made to address the unique challenges faced by different species. This diversity of solutions also serves as a wellspring of ideas for engineers looking into building robots that solve similar problems: locomoting efficiently, manipulating objects, and navigating challenging terrain. This borrowing of concepts from biology or bioinspiration continues to serve the field of robotics and artificial intelligence well. It has led to the development of algorithms that model a robot’s surroundings using only sparse sensory information, soft materials that allow robots to squeeze through narrow passageways, and deep learning neural networks that continue to topple the world’s human champions in games like Chess, Go, and Poker.
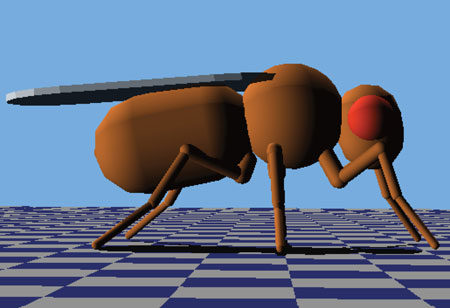
Figure 1. The Drosophila model we used for our gait optimization experiments.
I focused on neurobiology during my undergraduate and graduate studies but always found myself drawn to the question of how nervous systems and behaviors evolve. So, when considering postdoctoral laboratories, I was interested in studying how changes in Drosophila melanogaster gene expression might lead to alterations in sensing and behavior. But I was also fascinated by studies in engineering that had used artificial evolutionary algorithms to design the behavior of robots in an unbiased manner. This computational approach allows scientists to investigate questions pertaining to the evolution of animal behavior that are otherwise experimentally inaccessible. When I asked my PhD advisor which direction I should pursue, in a moment of – perhaps accidental – wisdom he asked “why not both?”
For some reason, it had never occurred to me that one could work simultaneously in such technically disparate – albeit conceptually linked – fields. Several months after submitting a fellowship application, it seemed that HFSP was happy to facilitate such an unusual endeavor: I won a Long-Term Fellowship to work jointly in two laboratories studying neurogenetics and robotics. In retrospect, this fellowship gave me an unusual and incredible opportunity to combine engineering and classical neurobiological approaches to study complex biological phenomena. For example, I ended up working on the neurogenetics underlying collective behavior and the role of neural noise in locomotor patterning.
Along with these research directions, I was also very interested in identifying the conditions that may have led to extant animal behaviors. As I became more familiar with Drosophila melanogaster and insect behavior, I noticed a common theme in their locomotor control: while walking fast, terrestrial insects use a tripod gait during which three legs are on the surface at any given time. This contrasts with dynamic fast gaits used by vertebrates, like galloping horses, where occasionally as few as one or no legs are on the ground. A clue to this disparity may rest in the fact that when we observe insects in our homes or in nature they are often found on vegetation, walls, or even hanging from the underside of leaves. Therefore, it has been proposed that the tripod gait is prevalent among insects since it allows them to overcome the challenges of moving in three-dimensions – up, down, across vertical and inverted surfaces. Having only one or no legs on the surface would clearly make climbing more difficult or even impossible.
This is currently a very challenging hypothesis to test in real insects: one would need to be able to genetically reconfigure insect gaits and test their speeds and stabilities against the standard tripod gait. Therefore, to tackle this problem, my colleagues and I designed an in-silico insect model based on Drosophila melanogaster (Figure 1). We then computationally optimized the model’s gait for wall climbing and asked if the tripod gait would emerge as the fastest gait. Of course, to do this, we also had to equip our virtual fly with adhesion on the tips of its legs in a manner akin to the claws and pulvilli used by insects to stick to surfaces.
To find the best gaits in a 5-dimensional space (a gait was defined as the phases of motion for six legs minus one reference leg), we used a Particle-Swarm algorithm that mimics the way that schools of fish collaborate to find resources in the environment. The process was fun to watch. In the beginning, using random gaits, our fly models would awkwardly hobble in circles. However, by the end they would scurry rapidly up the virtual wall. At the end of each experiment, we were then left with the fastest gaits and, happily, our intuition seemed correct: the tripod gait emerged as fastest for climbing up vertical surfaces. This suggests that the tripod gait allows insects to most rapidly navigate challenging three-dimensional terrain.

Figure 2. The hexapod robot used in this study.
Next, we wanted to know if the tripod gait was also speed optimal for walking on the ground without adhesion – a common context for most hexapod robots that are designed to use the tripod gait. Surprisingly, we noticed that, instead of the tripod gait, our model walked fastest using a class of gaits that have never been observed in nature. We named these ‘bipod’ gaits since, when using them, our model had only two legs on the ground at any given time. To make sure this result was not just an artifact of our simulation environment, we built a simple hexapod robot (Figure 2) and ran it on the ground with either the tripod or bipod gait. Indeed, we found that the bipod gait was nearly 25% faster! In other words, our optimization algorithm had identified an alternative way to control hexapod robots that would make them significantly faster than they would be using the standard, bioinspired tripod gait. Using this computational approach, we could move beyond the solutions suggested to us by nature.
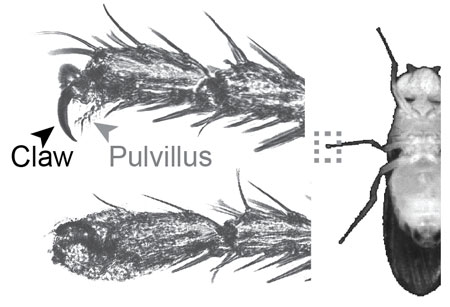
Figure 3. Blocking adhesion by covering Drosophila claws and pulvilli (top left) with a UV curable polymer (bottom left). (right) The region of the fly’s legs shown in the insets.
As a neurobiologist, I was also puzzled as to why the bipod gait had not yet been observed in nature. It seemed reasonable that since there are so many insect species that live in nearly every imaginable niche, one of them might have evolved to use the bipod gait. Of course, the locomotor gaits of most insects have never been examined and behaviors represent solutions to multivariate problems for which we may not even know the most important variables. Nevertheless, as a first foray into solving this puzzle, we asked if insects were even capable of controlling their legs in a bipod-like fashion. We expected that adhesion might constrain the number of gaits used by the fly so we covered the adhesive structures on the tips of the animals’ legs with a UV curable polymer (Figure 3). Remarkably, these polymer ‘boots’ caused flies to abandon the tripod gait entirely. Flies sometimes even used gaits with similarities to the bipod gait: their mid-legs moved synchronously in a manner similar to the sculling motion of water striders. This suggested to us that neural constraints might not prohibit the expression of novel insect gaits and that, perhaps in the future, we might be able to use computation-inspired design to build transgenic insects that walk using the bipod gait!
Reference
Climbing favours the tripod gait over alternative faster insect gaits. Ramdya P, Thandiackal R, Cherney R, Asselborn T, Benton R, Ijspeert AJ, Floreano D. Nature Communications 2017 8:14494.
Link to article
Pubmed link
Press in Science Magazine