


































Fast and complex movements of animals depend on finely tuned sensory control of their locomotion. What applies for locomotion on the ground or in the air also applies in aqueous environments. Starting in 2017, HFSP supported an international team that set out to investigate locomotion control in undulatory animals, including transitions between different habitats. The underlying idea was that a single control principle could explain different modes of locomotion in vertebrate and invertebrate animals for different morphologies in different habitats (water and ground).
The team around principal investigator Auke Ijspeert, from the Biorobotics Laboratory at EPFL in Lausanne, Switzerland, included Akio Ishiguro, from the Research Institute of Electrical Communication at Tohoku University, in Sendai, Japan, and Emily Standen, Department of Biology at University of Ottawa, Canada. Inspired to understand the interplay between different known sensory-driven locomotor models in biology their goal was to create a robust, integrated model that would function across a variety of environments. In a truly interdisciplinary approach, the project integrated a remarkable array of research tools combining animal locomotion studies, neuromechanical simulations, and robotic experiments.
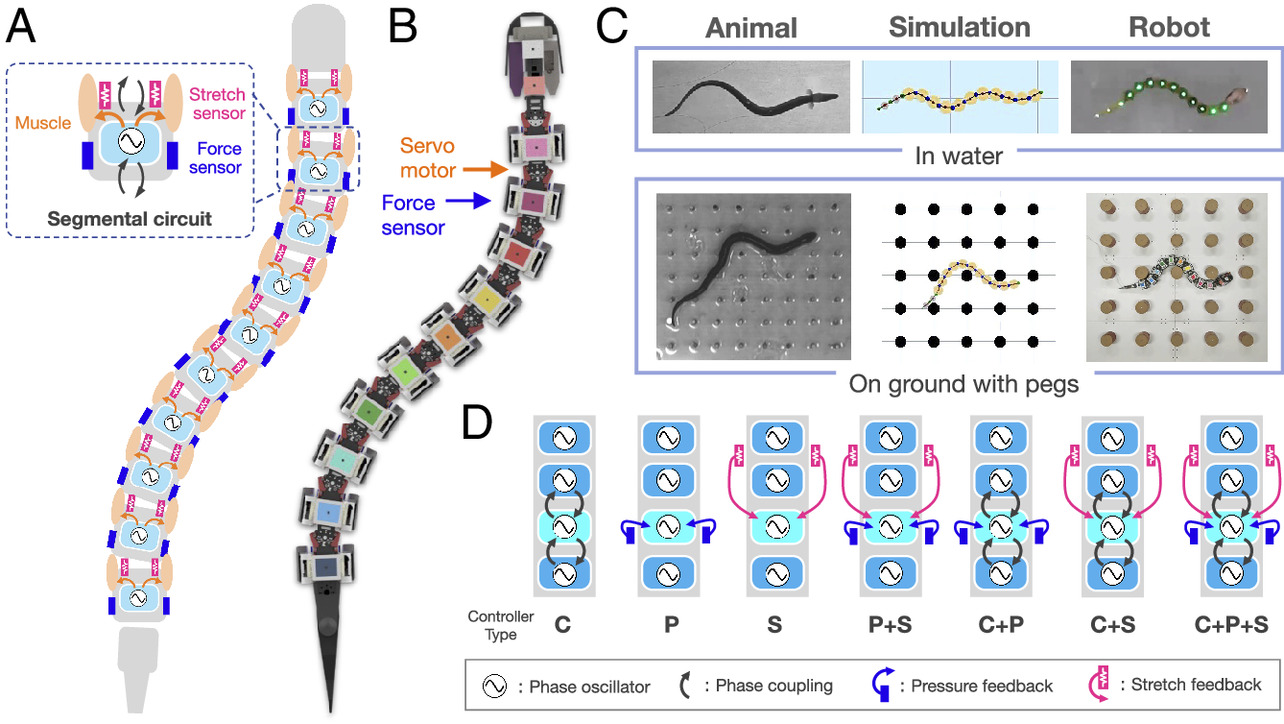
About 8 years and many experiments later, the team has come up with interesting conclusions as to the control mechanisms that are in play in undulatory animals. The main finding: redundancy in control systems allows for versatile locomotion across environments. Connectivity between rhythmic nerve centers along the spine, internal sensory feedback (stretch sensing) and external sensory feedback (pressure sensing from the environment) can all contribute isolated or in combination to achieve effective locomotion. Although all combinations result in effective locomotion, combinations of input result in a faster convergence to steady state swimming. These same control models can explain terrestrial locomotion as well, showing that stretch feedback is particularly important for exploiting the heterogeneity found in terrestrial environments that can be used to push oneself forward.
In short, simulations confirmed by real world robotic experiments suggest that the remarkable capacity of biological organisms to move between environments can be explained in part by integrated and redundant sensory feedback systems. These feedback systems might also explain the high robustness of eels against spinal cord injury, a feat that is quite unique among vertebrate animals.